Introduction
Drones and quadcopters have revolutionized various industries, from aerial photography to agricultural monitoring and surveillance. At the heart of every drone lies a flight controller, which ensures stable flight, precise control, and seamless maneuverability. This blog explores the development of a custom-built Arduino-based flight controller, designed to provide a cost-effective and DIY-friendly alternative to commercial flight controllers.
Overview of the Arduino-Based Flight Controller
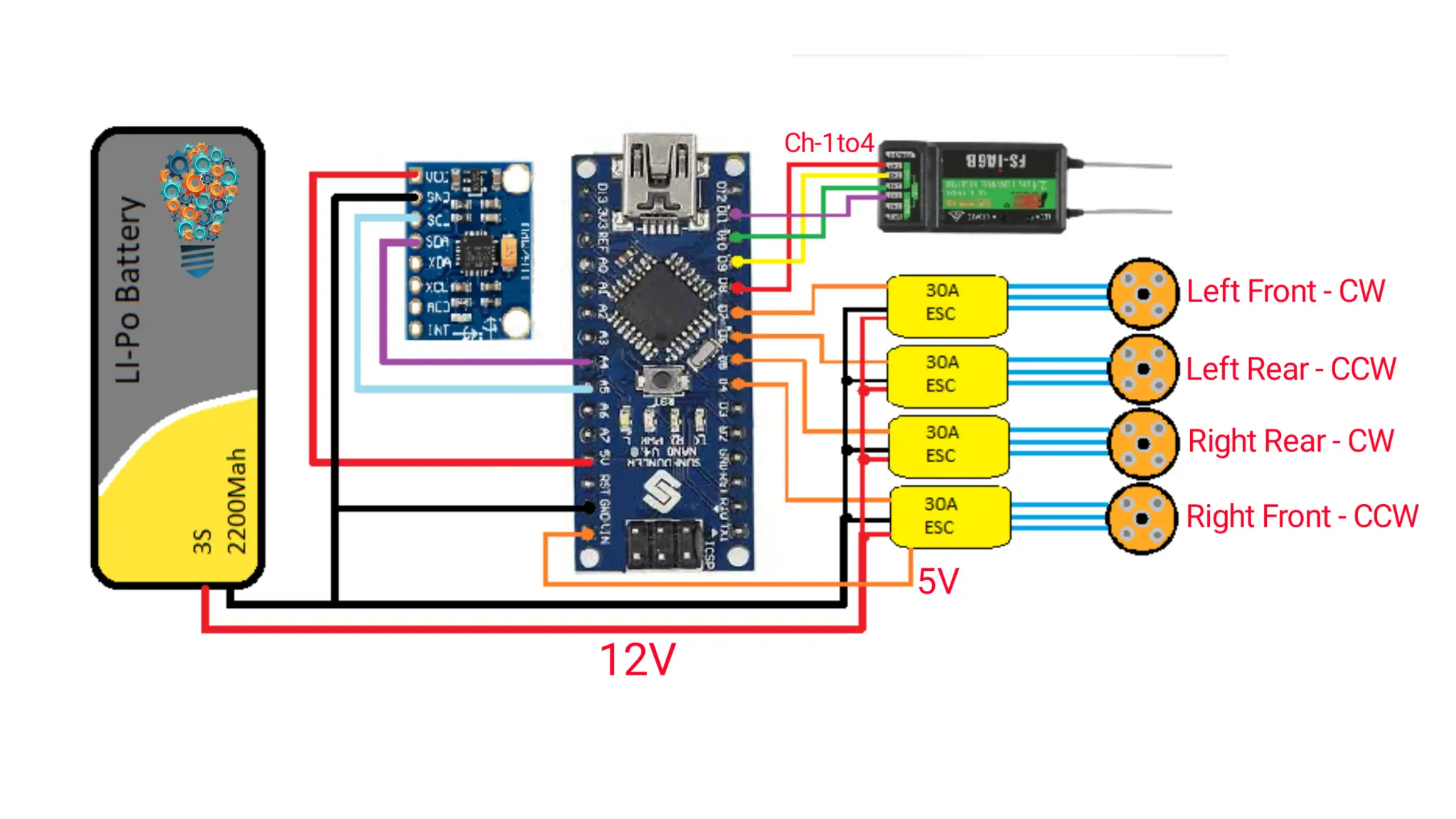
This Arduino-based flight controller is built using an Arduino Nano, MPU6050 sensor (gyroscope & accelerometer), and a FlySky IA6B receiver. The combination of these components enables real-time motion sensing, data processing, and remote-controlled flight, making it an ideal solution for hobbyists, students, and developers working on drone projects.
Components Required:-
Arduino Nano
GPU6050 Gyroscope Sensor
Fs-i6 B Receive
3S Li-Po Battery
Male/Female Header Pin
Pcb Board
Key Components and Their Functions: -
1. Microcontroller – Arduino Nano
The Arduino Nano serves as the brain of the flight controller, responsible for:
- Processing sensor data from the MPU6050.
- Controlling the speed of motors via Electronic Speed Controllers (ESCs).
- Communicating with the FlySky IA6B receiver to process user inputs from the FS-i6 transmitter.
- Ensuring real-time stability adjustments for smooth flight operations.
2. IMU Sensor – MPU6050 (Gyroscope & Accelerometer)
The MPU6050 is a key component for maintaining flight stability. It provides:
- Gyroscopic data to measure angular velocity and determine orientation.
- Accelerometer data to sense linear acceleration, aiding in flight corrections.
- Communication via the I²C protocol for efficient data transmission to the Arduino.
3. Receiver & Transmitter – FlySky IA6B & FS-i6
To enable remote control of the quadcopter, the system uses:
- FlySky IA6B Receiver: A 6-channel PPM/PWM receiver that offers a stable signal with minimal latency, ensuring precise maneuverability.
- FlySky FS-i6 Transmitter: A popular 2.4GHz 6-channel radio transmitter with a user-friendly interface and long-range capabilities.
4. Connectivity & Expansion
The flight controller supports easy connections to external components, including:
- 4 Male Header Pins for quick interfacing with ESCs and motors.
- PWM-based motor control, allowing seamless integration with quadcopter propulsion systems.
Circuit Diagram: -
Watch Full Video on YouTube: -
Working Principle of the Flight Controller
1. Sensor Data Acquisition
The MPU6050 sensor continuously monitors the movement of the quadcopter and provides real-time gyroscopic and accelerometer data to the Arduino Nano.
2. Data Processing and Stabilization
The Arduino processes the sensor data and adjusts motor speeds accordingly to maintain stability and smooth flight operations.
3. User Input and Signal Transmission
The FlySky IA6B receiver receives control signals from the FS-i6 transmitter and transmits them to the Arduino. These signals determine the quadcopter’s movements, such as throttle, yaw, pitch, and roll.
4. Motor Control and Flight Execution
The processed signals are then sent to the ESCs, which regulate the speed of the brushless motors, enabling controlled flight and precise movements.
Applications of the Arduino-Based Flight Controller
This flight controller can be used in various applications, including:
- DIY Drone Projects: Perfect for drone enthusiasts looking to build and experiment with their own quadcopters.
- Educational Purposes: Helps students and researchers understand the fundamental principles of flight control systems.
- Autonomous UAV Development: Can be modified for autonomous flight by integrating GPS, telemetry, and additional sensors.
- Aerial Photography & Surveillance: When paired with a camera module, it can be used for aerial photography and security applications.
Advantages of This Flight Controller
✅ Cost-Effective: A budget-friendly alternative to commercial flight controllers.
✅ Highly Customizable: Can be tailored for different drone applications.
✅ Real-Time Stabilization: Integrated gyroscope and accelerometer ensure smooth flight.
✅ Reliable Wireless Communication: FlySky IA6B and FS-i6 provide stable signal transmission.
✅ Easy to Build & Expand: DIY-friendly design with seamless integration options.
Conclusion
Building an Arduino-based flight controller for quadcopters and drones is a rewarding experience, offering deep insights into flight control systems. This affordable and customizable solution empowers drone enthusiasts, students, and researchers to explore aerial robotics while maintaining full control over their drone’s functionality.
Whether you’re a hobbyist looking to build your first drone or an engineer working on UAV prototypes, this project provides a solid foundation for learning and experimentation. 🚀
Our latest content
Check out what's new in our company !